Bora Ayhan
Student & Developer
Hey there! I'm Bora — a student & (aspiring) engineer. Check out below what I've been up to recently!
Hey there! I'm Bora — a student & (aspiring) engineer. Check out below what I've been up to recently!

Following a successful hackathon at the School of Mines, I was invited to intern at their Autonomy, Robotics, and Intelligent Algorithms (ARIA) Lab, under PI Prof. Kaveh Fathian, where I had the privilege of spending the summer working alongside some of the most brilliant software students in high school and college alike. Special thanks to Adriana Tan of Vanderbilt, a fellow intern, for photo credit.
- Implemented vision algorithms and SLAM systems using the Robot Operating System (ROS2) hosted on Docker.
- Published open-source drivers and packages, alongside internal documentation for the Boston Dynamics Spot® and the Clearpath Robotics Husky®.

After self-studying John D. Anderson’s Introduction to Flight and taking the EdX course Introduction to Aerospace Engineering (AE1110x) by TU Delft in 2024, I was inspired to practice applying the concepts covered to the real world. Although the course was highlight theoretical, I was able to smoothly apply concepts spanning from airfoil optimization to improving longitudinal stability
- Created a custom open-source, low-budget flight computer, joystick input interface, and radio communication protocol.
- Designed and fabricated a model unmanned aerial vehicle with a tuned airfoil, using a variety of materials and tools.
I maintain and devleop Consolidate, a Python library. It can fill strings with invisible characters, creating strings that appear identical but are distinct. Useful for cybersecurity purposes.
- About 500 downloads monthly
- Originated as a component of a personal (non school-related) project with a friend; expanded to become a standalone project
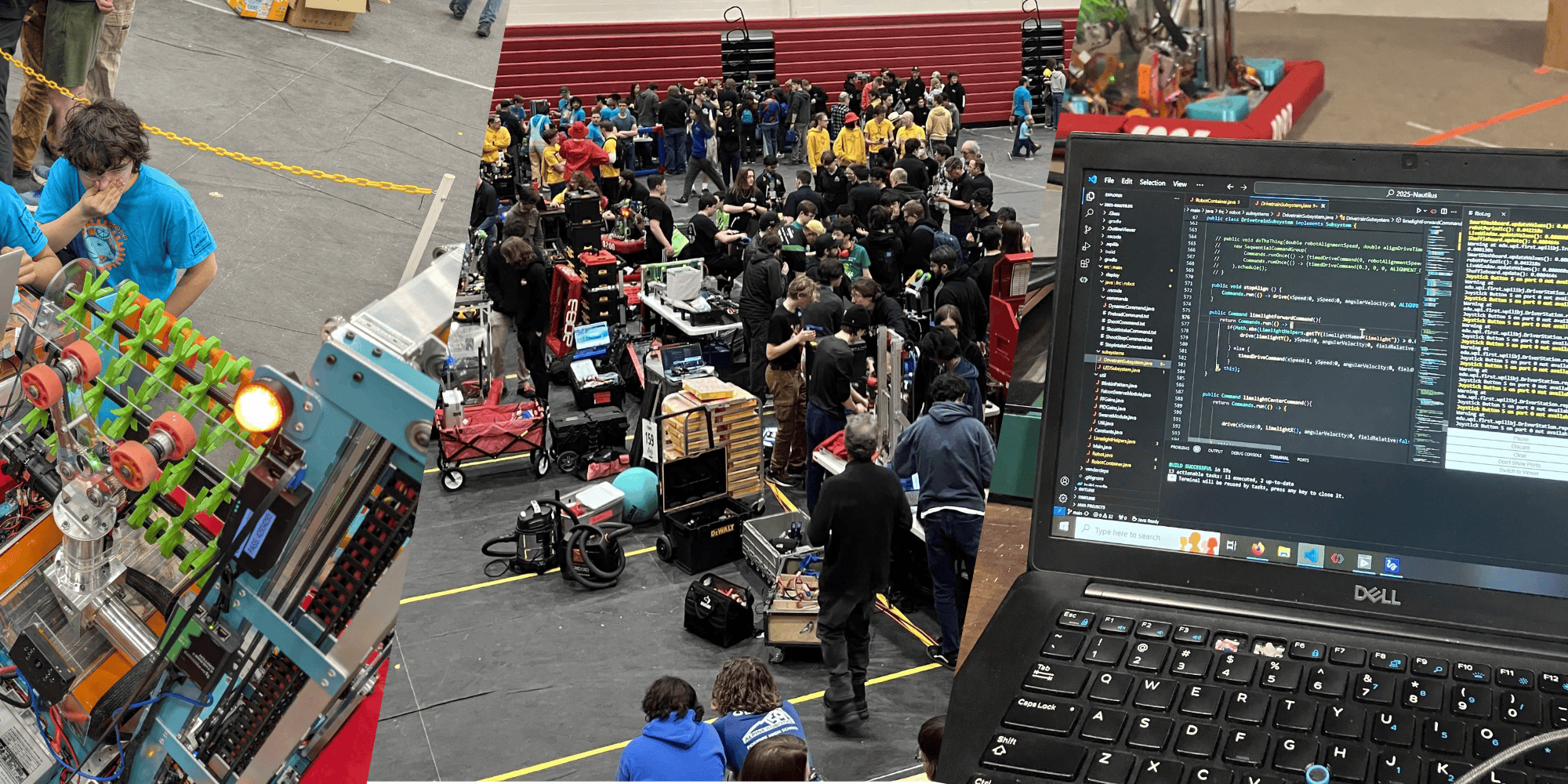
Following on my FIRST Lego League experience, I decided to join a FIRST Robotics Competition (FRC) team — Team 4293 Komodo. Working on Jacques and Nautilus (a previous year's robot, repurposed as a testbench), I implemented software alignment algorithms.
- Computer vision alignment algorithm
- Projectile trajectory computation
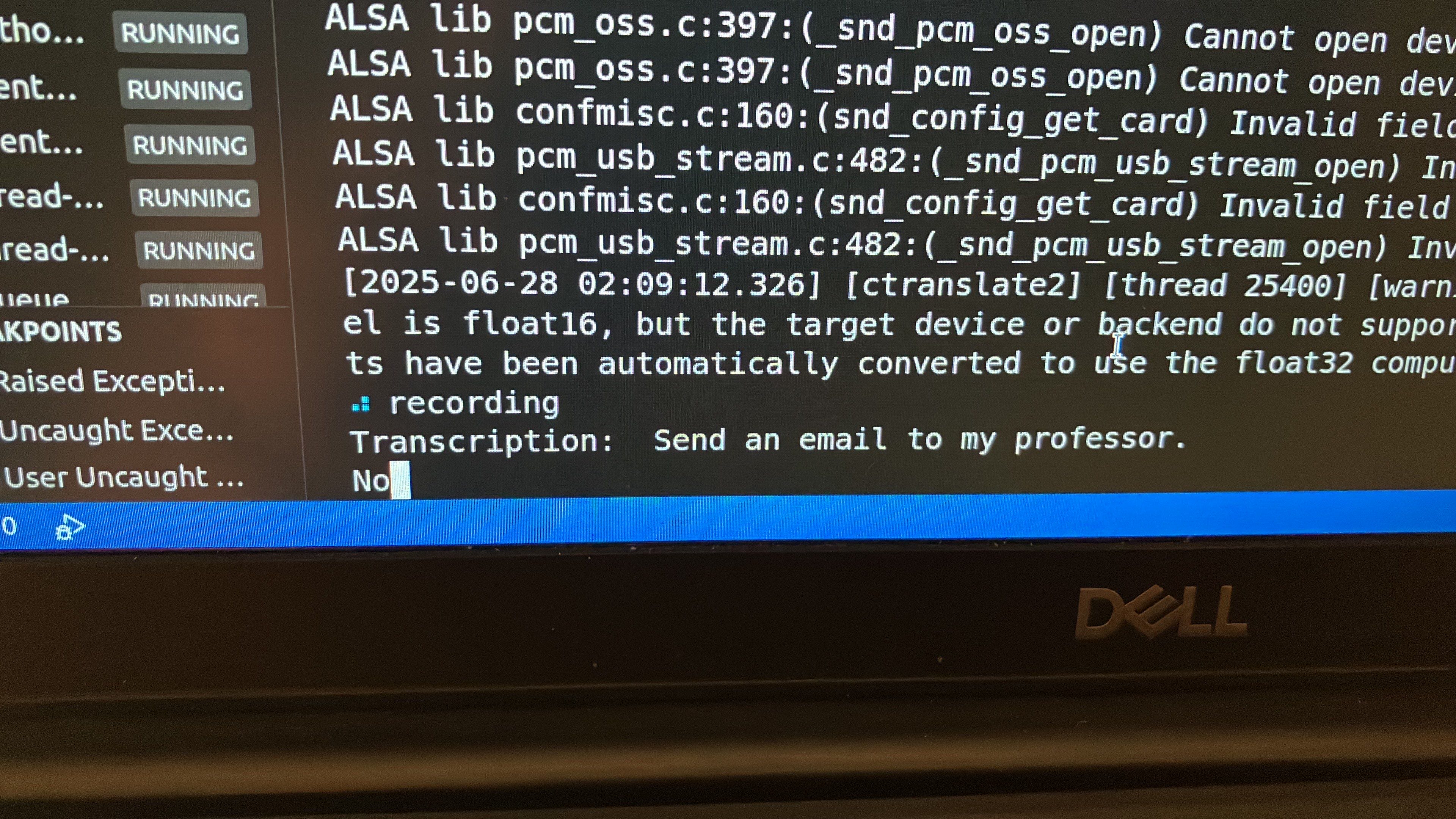
An LLM-powered smart assistant running locally on an old laptop. It can do anything from reading emails to creating to-do list items based on . The photo above shows one of the funny outputs it's provided. Just like any story, however, there's a context. I was testing its adherence to structured outputs, with an answer of strictly 'yes' or 'no'.
- Each input/output handler (LLM, TTS, STT, etc) is offline and secure, since they are locally hosted and open-source.
- Integration with task management software Trello and its API. (Originally designed for purely this, since it is annoying to manually create tasks in Trello)
- Task assignment model with structured output format to call on other capable-LLMs.
- The project is in the works, and I intend to keep developing it throughout college as both I and AI agents get smarter.

Waterpolo is a sport that is only meaningfully playable and practice-able if you have both A) a pool, and B) at least 5 other people. Both of these are difficult to obtain at a moment's notice, so I decided to simulate them instead, in order to practice aiming and strategy alike. The most fascinating thing about software, for me, is the ability to turn a bunch of 1's and 0's into real, measurable impact, and virtual reality is a pristine example of this. It was awesome using my game development skills for something other than pure entertainment.
- Features realistic physics and adjustable props (waterpolo ball, cages, etc)
- Intuitive controls that accurately simulate the tactile aspects of real waterpolo
- Simple to adust scenery
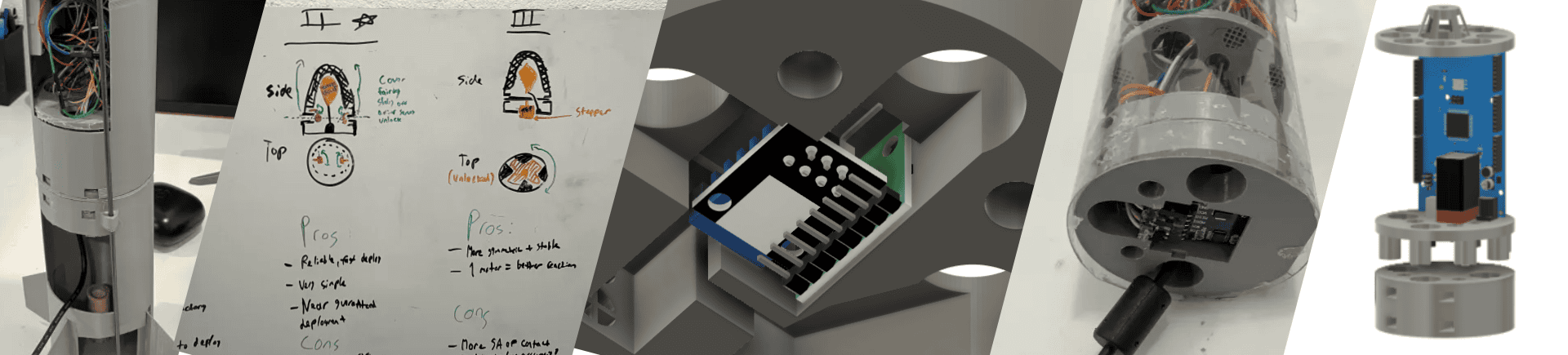
Following some experimentation with integrating sensors to model rockets, I officially designed my first Arduino-based rocket after 2 years of flying model rockets. “If it’s your first, why is it called Mk2, Bora?” Great question, the Mk1 iteration was designed by hand, using nothing but a ruler, protractor, and pencil. Mk2 was designed in CAD, and 3D printed.
- Designed and built a rocket sensor computer, which stores more than 10 flight parameters onto an onboard SD card.